航空航天与国防、电子、功能概述,发射,平衡环和光学坐骑,激光扫描头,激光系统、医疗器械制造、运动控制平台、电机、压电Nanopositioners,精密制造,与进程相关的产品、阶段和执行机构亚博微信vip群
功能概述
加强跟踪控制(等)
Aerotech独特的增强跟踪控制(等)特性可以提高move-and-settle次点对点定位和减少跟踪误差在波状外形的运动。它可以在所有Aerotech控制器(A3200,合奏®和独奏者®)包括我们位®CLS高性能检流计控制器。增强的跟踪控制算法与传统Proportional-Integral-Derivative (PID)控制体系结构,提高伺服机构拒绝干扰的能力,否则会导致位置错误。
背景
轴承摩擦导致的许多动态精密定位系统中的错误。一个简单的库仑摩擦模型是适合大规模的运动,但行为micron-levels下面要复杂得多。多个滚动元素之间的相互作用与不同预装和润滑水平导致滞后作用力和位移之间的关系。简单地说,机制尽量不要移动线性伺服理论预测他们应该。结果是一个长尾的沉淀时间控制器试图把阶段到最终位置,或峰值的位置误差,当一个阶段的变化方向。
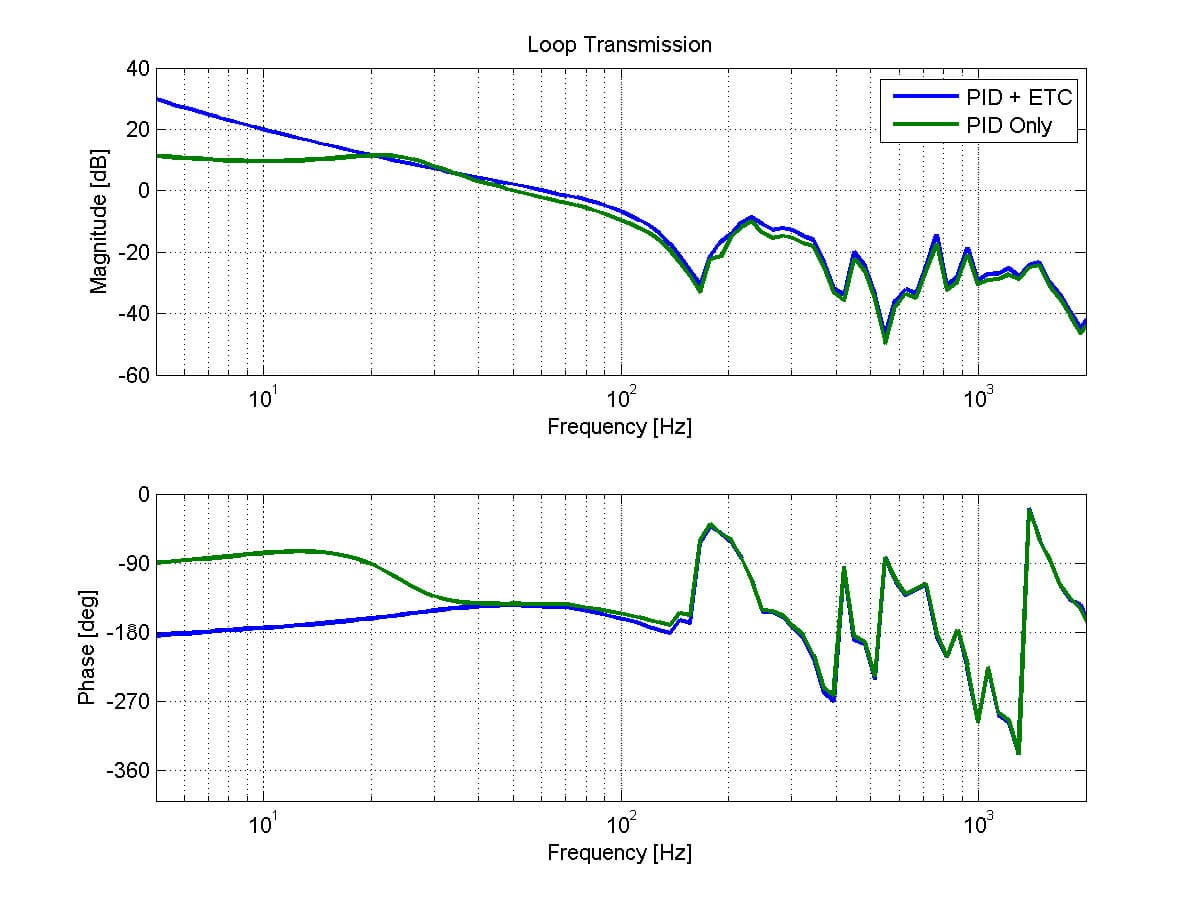
轴承摩擦的影响显然是表明伺服环路增益的频率响应图(图1)。理想反应过渡顺利从高增益低频率(表明良好的控制权力)通过交叉频率低增益高频率(必要阻止不必要的机器振动)。轴承摩擦创建一个响应在低频率,减少和降低环路增益意味着较慢的反应干扰。增强的跟踪控制算法提高了伺服系统的频率响应低导致动态行为更接近理想的无摩擦系统。
调优技术
增强的跟踪控制算法简单调整,而且通常不需要改变现有的PID增益。系统首先应该传统调谐性能和稳定性指标,最好是量化的整体循环传输测量。增强的跟踪控制功能只需要两个额外的参数:一个比例因子和带宽。自动调谐算法确定比例因子(惯性、运动力常数和传感器分辨率),和带宽设置控制器的一小部分交叉频率。
改善点对点定位
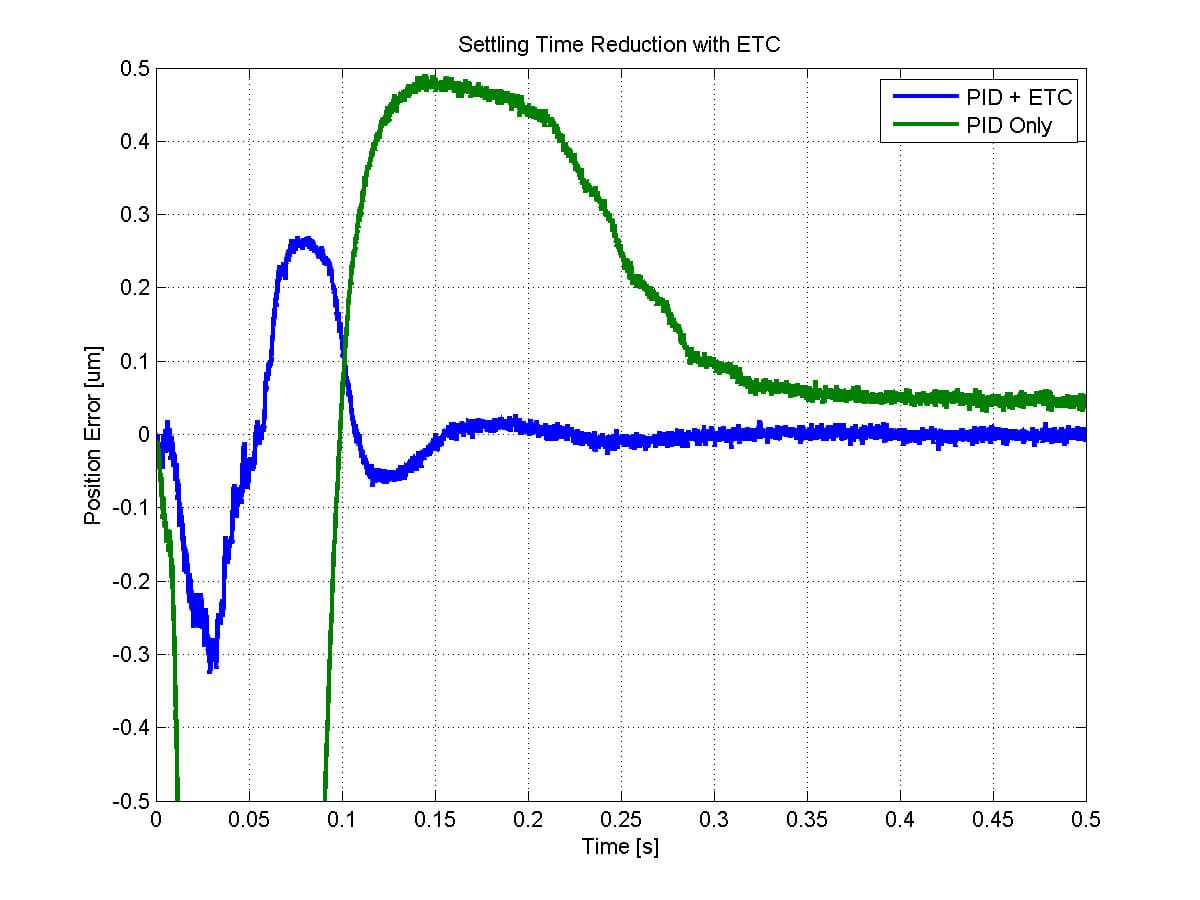
增强跟踪控制算法改善点对点定位性能通过消除与结算相关的长尾亚微米公差(图2)。系统与滚动体轴承通常需要很长时间在准静态条件下滚动元素几乎是,但不完全,在最后的位置。更高的伺服环路增益较低的频率提供了额外的努力来推动轴承摩擦当使用增强的跟踪控制算法。
改进的动态跟踪
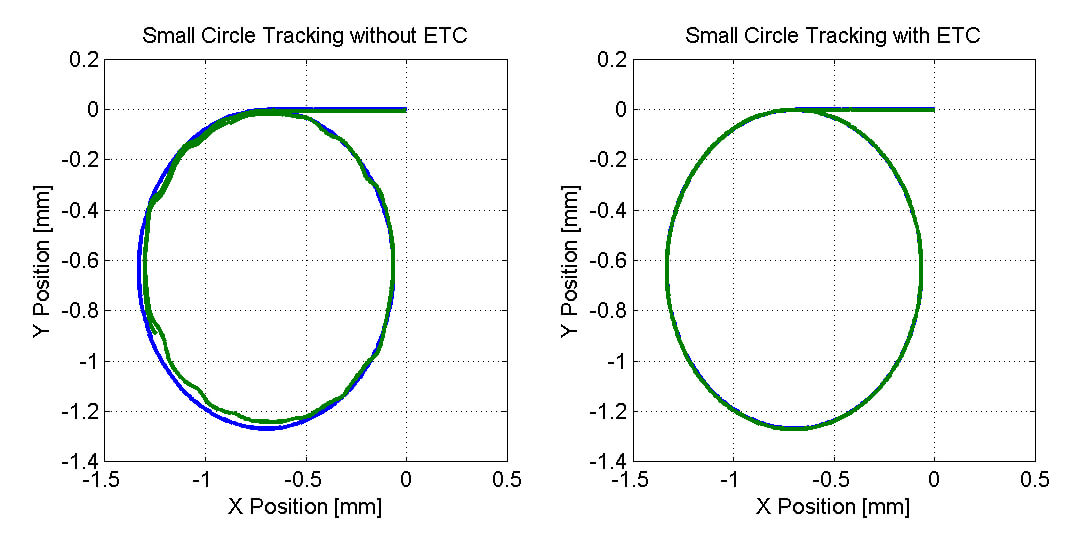
动态跟踪性能也提高了增强跟踪控制算法时拒绝干扰的力量。跟踪错误通常是在方向逆转,小圆概要文件的一个最具挑战性的伺服机构跟踪。图3显示了一个4 x减少峰值跟踪错误当等应用于复杂的轮廓可能在激光切割应用。
改进检流计镜控制
高速激光使用的轻量级镜子电流计尤其容易甚至最小的干扰力。甚至高质量轴承表现出非线性摩擦行为会降低定位精度的应用程序的性能。图4显示一个命令的跟踪误差跟踪圈以127赫兹的频率,没有等位置误差,并最终质量,改进的算法是启用的。
总结
Aerotech增强跟踪控制(等)特性的改善点对点的建立时间和减少跟踪误差精度的应用程序。接触Aerotech今天讨论应用程序吞吐量和发现等可以改善你的过程和质量。